水下装备作业仿真实训
根据海水深度、洋流速度和方向、浑浊系数和天气参数,逼真模拟水下仿真效果,包括水下地形地貌(依据高程数据和影像数据构建)、浑浊度可视范围、水面动态反光效果、水下动态光线效果,同时模拟水下参数化重力、浮力和浮动物理效果;
根据1:1的物理数据和机构动力学原理,构建水下作业装备三维模型,包括多种型号的水下机器人、潜航器等,可实现由数据驱动的水下装备机构运动过程与操作控制过程控制。
水下工程装备作业过程仿真训练
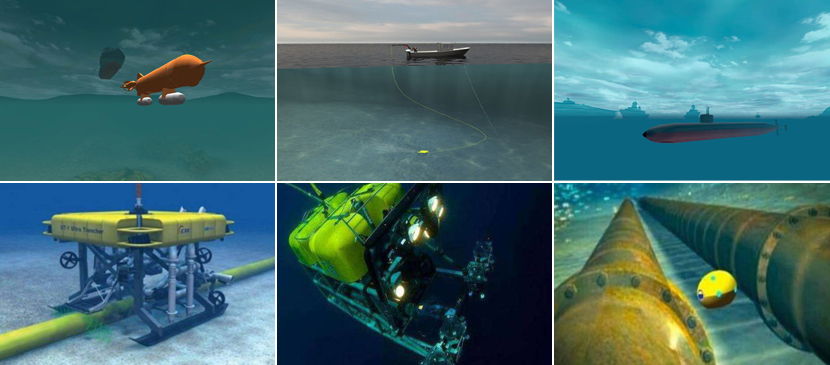
用户可根据实际应用需要,通过专业的交互设备反复模拟操作虚拟场景中的各种水下仿真装备,如:水下机器人作业,潜航器航行、沉船打捞、水下设备维护、水下电缆或管道的铺设与维护等,从而达到模拟训练和仿真演练的目的。可单机操作训练,也可以进行分布式协同演练。
用户可根据实际应用需要,通过专业的交互设备反复模拟操作虚拟场景中的各种水下仿真装备,如:水下机器人作业,潜航器航行、沉船打捞、水下设备维护、水下电缆或管道的铺设与维护等,从而达到模拟训练和仿真演练的目的。可单机操作训练,也可以进行分布式协同演练。
可根据声纳工作原理,构建声纳探测可视化工作流,用户可实现水下目标探测(包括:潜航器、水下地形等),并根据目标对象的坐标位置实时计算距离和方向。并可根据既定的通信协议模型,构建部署海底无线声纳探测网络系统。